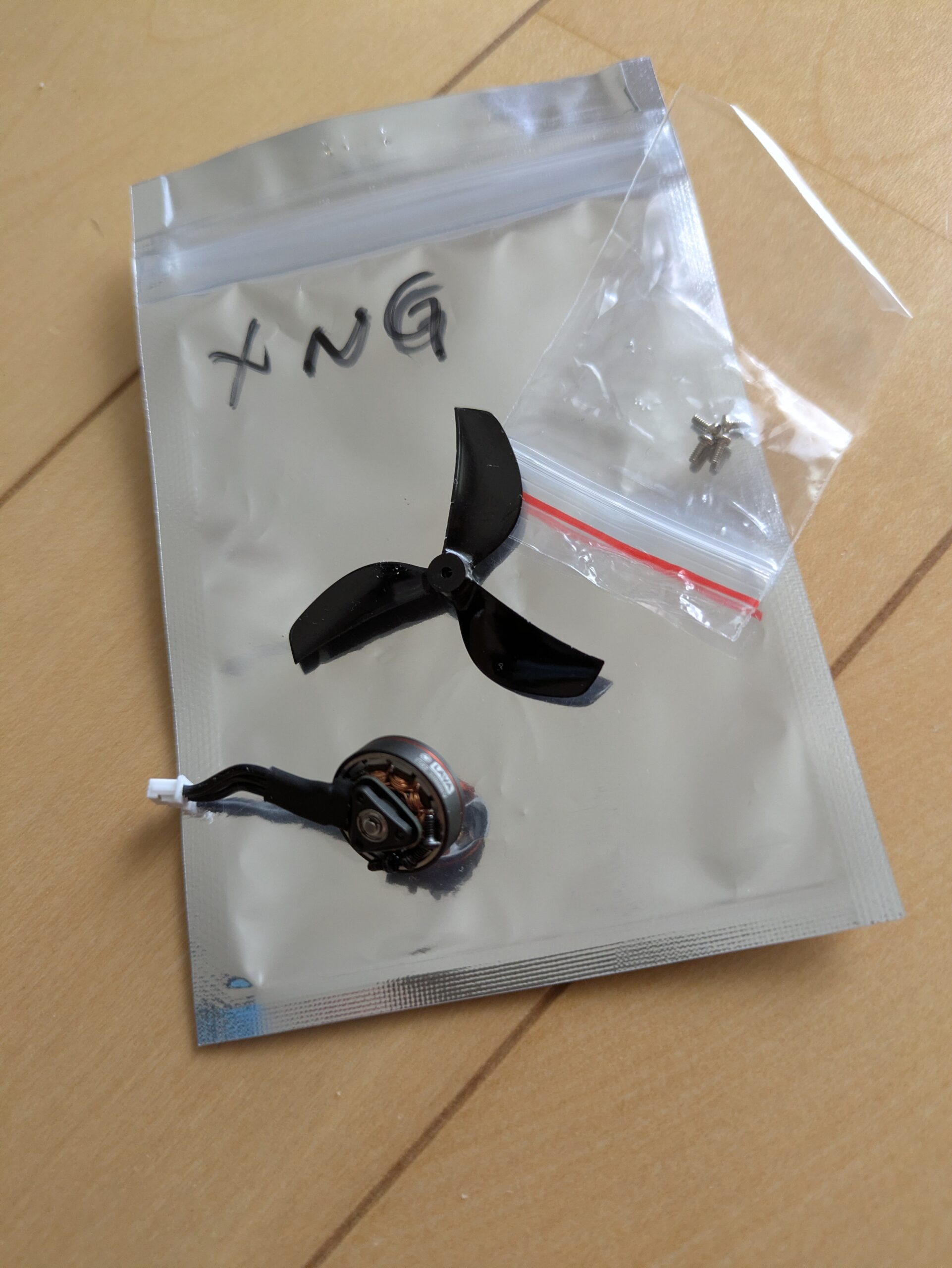
Pavo Pico IIの訓練中に墜落事故を起こし、モーター1基を焼損してしまった。やはり初心者あるあるで墜落した際のプロペラへの異物巻き込みが原因である。かなりの臭いがしたのはおそらくベアリングのグリスだろうと感じた。再度ARMしてみたが、1基だけ回転が不自然だった。PCを起動させBETAflightに繋いでモーターテストをしてみたがどうも1基の回転がスムーズではない。
予備として用意していたBETAFPVの13500KVモーターへ交換することにしたが、せっかくなら条件を揃えたいと考え、4基すべてを交換した。ちなみにハーネス長には種類あり注意。プロペラも4枚予備のものに換えてみた。
交換作業を終え、期待とともにテスト飛行を実施。しかし機体は以前のように安定せず、まともにホバリングができない。常に前方へ流れ、後方へエレベータを当て続けなければ姿勢を維持できない状態だった。
最初は重心を疑った。
バッテリー位置を変えたり、機体バランスを確認したりしたが、大きな改善は見られない。
次にモーター交換作業そのものを疑った。
モーターの回転方向や取り付け状態を確認したが異常は見当たらない。
そこで原因は設定側にあるのではないかと考え、Betaflightを調査することにした。FCがダメージ受けてなければいいが。
調べるうちに、FC(フライトコントローラー)の水平キャリブレーションが正しく行われていない可能性に気付く。
機体をできるだけ水平な状態に固定し、FCの水平キャリブレーションを実施。
再度テスト飛行を行ったところ、機体の挙動は大きく改善した。
もちろん操縦技術の未熟さは残っているが、少なくとも以前のような異常な前進癖はなくなり、Angleモードでのホバリングが可能になった。この機体はCamera搭載FPVを前提にしており初期設定も最初かなりピーキーに感じた。そのため今回の事態をきっかけに設定をBETAflightで多数やり直した。
今回のトラブルで学んだことは、機体の不調は必ずしもハードウェア故障とは限らないということだ。
モーターを疑い、重心を疑い、最後に設定を疑った結果、原因はFCのキャリブレーションだった。
ドローンは飛行体であると同時にコンピュータでもある。
今後も機械だけでなく、ソフトウェアや設定についても理解を深めていきたい。
【今後の課題】
・ホバリング精度向上
・スクエア飛行習得
・高度維持の安定化
・BetaflightのPID理解
・Rates設定の理解
まだスクエア飛行も安定していない初心者だが、一歩ずつ経験を積んでいきたい。Pavo Pico IIとの付き合いは、まだ始まったばかりである。
コメントを残す